0 引言
壓力焊是焊接科學技術(shù)的重要組成之一,廣泛應用于航空、航天、能源、電子、車輛及輕工等部門。統(tǒng)計資料表明,用壓力焊完成的焊接量,每年約占世界總焊接量的1/3,并有繼續(xù)增加的趨勢。為了適應新材料、新工藝、新產(chǎn)品在工業(yè)上開發(fā)應用的需要,近年來,國內(nèi)外在壓力焊焊接接頭形成理論、焊接質(zhì)量監(jiān)控技術(shù)、焊接新工藝及新設(shè)備的開發(fā)和新材料焊接等方面作了大量工作。
鑒于壓力焊專委會在焊接學會中的分工,本文僅就電阻焊和摩擦焊技術(shù)的新發(fā)展作一綜述。
1 電阻焊技術(shù)新發(fā)展
電阻焊(Resistance Welding),工件組合后通過電極施加壓力,利用電流通過接頭的接觸面及鄰近區(qū)域產(chǎn)生的電阻熱進行焊接的方法,主要由點焊、對焊、縫焊和高頻焊等組成。電阻焊是一種焊接質(zhì)量穩(wěn)定,生產(chǎn)效率高,易于實現(xiàn)機械化、自動化的連接方法。
1.1 電阻焊接頭形成理論研究進展
電阻焊接頭形成理論研究為電阻焊新材料、新工藝、新設(shè)備、接頭質(zhì)量監(jiān)控技術(shù)等發(fā)展創(chuàng)造了條件。因此,它不僅具有較高的學術(shù)理論意義,也有很大的工程實用價值。
1.1.1點焊熔核孕育處理
國內(nèi)學者趙熹華等人,在國家自然科學基金和美國GM基金資助下對多種難焊金屬材料(鋁合金、彈簧鋼等)開展了“點焊熔核孕育處理理論與方法”的研究,現(xiàn)已取得如下成果:
(1)首次獲得了全部凝固組織為等軸晶的點焊熔核(圖1b)。
(2)首次使全部為柱狀晶的點焊熔核貼合面處出現(xiàn)等軸晶區(qū)(圖2b)。
(3)擴大熔核等軸晶區(qū),縮小熔核柱狀晶區(qū),使凝固組織晶粒顯著細化。
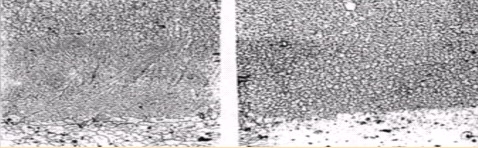
(a)未經(jīng)孕育處理(柱狀晶+等軸晶) (b)經(jīng)過孕育處理(等軸晶)
圖1 LY12CZ鋁合金點焊熔核
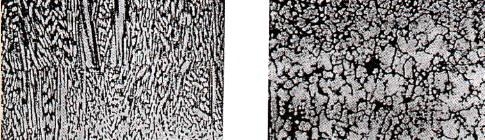
(a)經(jīng)孕育處理(柱狀晶組織及貼合面)(b)經(jīng)過孕育處理(貼合面處的等軸晶組織)
圖2 65Mn彈簧鋼點焊熔核
研究結(jié)果表明,孕育處理可顯著提高點焊接頭力學性能,尤其是疲勞強度。這就為點焊質(zhì)量監(jiān)控技術(shù)開辟了一條新路,從“質(zhì)”的方面根本改善了點焊接頭質(zhì)量。
1.1.2電阻焊過程的數(shù)值模擬
數(shù)值模擬技術(shù)可靈活地對電阻焊過程中的各種影響因素進行研究,幫助人們進行一些不可能通過試驗而完成的研究和分析,從而為電阻焊研究提供理論上的指導。其中點焊接頭形成過程的數(shù)值模擬研究一直是該領(lǐng)域科學研究發(fā)展的重要趨勢。目前的研究主要集中在點焊過程中的熱、電、力行為,即根據(jù)物理學中描述熱、電、力問題的基本方程,通過對方程中參數(shù)變化和邊界條件進行假設(shè),建立點焊過程的數(shù)學模型,進而用數(shù)值方法對點焊過程的溫度場、電流場、電勢場和應力、應變場進行求解,用以研究點焊過程機理。近期研究進展見表1。
表1 點焊過程數(shù)值模擬研究進展

1.1.3新型工業(yè)材料焊接性研究
新型工業(yè)材料—鍍鋅鋼板和鋁合金等在汽車工業(yè)中獲得了大量應用,但由于其物理性能上的特殊性,其點焊焊接性很差,尤其是點焊過程中電極的磨損和沾污,嚴重影響了連續(xù)點焊生產(chǎn)。而小焊點和粘焊等缺陷又使點焊接頭力學性能和可靠性沒有保障,尤其是鋁合金更為嚴重。因此,必須對這些材料的點焊焊接性作進一步深入細致的研究。
鍍鋅鋼板焊接性研究主要集中在以下方面:
(1)鍍層涂復方法(電鍍鋅、熱鍍鋅、熱鍍Zn—Fe合金)及鍍層厚度影響。 #p#分頁標題#e#
(2)鍍層與電極頭之間相互影響,法國學者T. Dupuy對電極端部損壞作了專題研究。
(3)熔核結(jié)晶形態(tài)、缺陷產(chǎn)生機理、力學性能等與點焊參數(shù)的關(guān)系等。
(4)以信息和控制新技術(shù)對點焊工藝和過程進行模擬和預測。
鋁合金板焊接性研究主要集中在以下方面:
(1)電極粘結(jié)和噴濺產(chǎn)生機理及解決措施。例如,鋁合金點焊中飛濺的小波分析研究;在鋁合金板兩面分別鍍不同厚度的鉻酸鹽層,改變接觸電阻大小的效果研究等。
(2)鋁合金電阻點焊過程的數(shù)值模擬及能量分析等。
(3)鋁合金點焊工藝設(shè)計及質(zhì)量控制的智能化研究。
1.2 電阻焊質(zhì)量控制技術(shù)
保證電阻焊接頭質(zhì)量,提高其可靠性的核心就是在生產(chǎn)過程中運用先進的手段和設(shè)備實施質(zhì)量控制。特別是由于點焊工藝運用的廣泛性、重要性和具有代表性,點焊質(zhì)量控制技術(shù)始終是電阻焊領(lǐng)域研究的前沿和熱點。
眾所周知,點焊過程是一個高度非線性、有多變量耦合作用和大量隨機不確定因素的過程,具有形核過程時間極短,處于封閉狀態(tài)無法觀測,特征信號提取困難等自身特點。這就造成焊點質(zhì)量參數(shù)(熔核直徑、強度等)無法直接測量,只能通過一些點焊過程參數(shù)(焊接電流、電極間電壓、動態(tài)電阻、能量、熱膨脹電極位移、聲發(fā)射、紅外輻射和超聲波等)進行間接的推斷,這就極大影響了點焊質(zhì)量監(jiān)控的準確性和可靠性。經(jīng)過較長時間的探索和實踐,研究者已獲得如下共識:發(fā)展多參量綜合監(jiān)測技術(shù)是提高點焊質(zhì)量監(jiān)控精度的有效途徑,即充分利用監(jiān)測信息,采用合理的建模手段,建立合理的多元非線性監(jiān)測模型并使該模型能在較寬條件內(nèi)提供準確、可靠的點焊質(zhì)量信息,是質(zhì)量控制技術(shù)關(guān)鍵。研究表明,利用神經(jīng)元網(wǎng)絡理論、模糊邏輯理論、數(shù)值模擬技術(shù)及專家系統(tǒng)等可望解決真正的點焊質(zhì)量直接控制,將點焊質(zhì)量控制技術(shù)的研究推向一個新高度。
1.2.1基于模糊分類理論的點焊質(zhì)量等級評判
德國學者Burmeister認為,電阻點焊過程是一個分類過程,是不能用公式來清晰描述。只有通過監(jiān)測點焊過程參數(shù)的一些最大值或最小值來進行片面描述,這樣就可以從過程的函數(shù)描述轉(zhuǎn)換為過程的分類描述,并用現(xiàn)有的專家知識來建立分類等級。目前,已有用模糊分類的方法來評估焊接電流引起的過程信號(電極位移特征量、電極加速度特征量)和焊點質(zhì)量變化的報道。并指出模糊分類雖然適用于描述點焊過程的復雜性和非線性,可以用于焊點質(zhì)量的等級評估,但只能給出焊點質(zhì)量參數(shù)的大致范圍,而且評價的準確性難以避免地受到專家知識等眾多人為因素的影響。
1.2.2基于回歸分析理論的點焊質(zhì)量多參數(shù)監(jiān)測方法
鋁合金點焊焊接性較差,應用又日益廣泛,迫切需要解決其質(zhì)量監(jiān)控問題。英國學者M. HAO等人研制了一種鋁合金點焊多參數(shù)監(jiān)控系統(tǒng),該系統(tǒng)可采集點焊過程和識別較寬范圍過程現(xiàn)象的特征量,并利用回歸分析的方法估測焊點的熔核直徑和拉伸強度,試驗表明,回歸模型的估測值有足夠的準確性。
1.2.3基于神經(jīng)元網(wǎng)絡理論的點焊質(zhì)量多參量綜合監(jiān)測
國內(nèi)學者張忠典等人運用神經(jīng)元網(wǎng)絡理論,研究了低碳鋼動態(tài)電阻與焊點質(zhì)量之間的模型關(guān)系,建立了點焊質(zhì)量模糊綜合評判模型,實現(xiàn)了低碳鋼點焊質(zhì)量的多參量綜合監(jiān)測。實驗表明,即使在惡劣的生產(chǎn)條件下,該系統(tǒng)也能實時、準確地監(jiān)測點焊質(zhì)量,確定合理的質(zhì)量等級,滿足實時監(jiān)測及焊后評估的要求。
1.2.4基于數(shù)值計算的熔核直徑在線自適應控制
日本學者西口公之等人研發(fā)的該方法需在焊前預先輸入被焊件及其材質(zhì)的機械與熱物理參數(shù),焊接時每隔一定時間間隔檢測焊接電流與電極間電壓,按照熱傳導數(shù)學模型計算出溫度場分布情況,從而實時推算出熔核的生長情況,并據(jù)此反饋控制焊接電流以改變焊接區(qū)溫度上升斜率。通過合理調(diào)控各時間段溫度上升斜率,確保熔核長大過程及結(jié)束前達到要求的直徑。實際生產(chǎn)使用證明,本技術(shù)能較好的解決鍍鋅鋼板的點焊質(zhì)量。缺點是該方法需進行大量在線計算,必須采用高性能計算機,使設(shè)備投資增加。 #p#分頁標題#e#
目前,用數(shù)值模擬方法模擬鋁合金點焊過程熱—電—力學過程,預測點焊熔核的生長、電極磨損和裂紋形成情況等的研究正在進行,并取得一定進展。
同時,把模糊控制(FLC) 和人工神經(jīng)網(wǎng)絡(ANN) 建模相結(jié)合,所研究出的點焊智能控制系統(tǒng)正受到國內(nèi)外學者和企業(yè)的重視。
1.3 電阻焊新工藝
1.3.1隨機多脈沖回火熱處理點焊
該工藝可解決焊接性較差的可淬硬鋼等的接頭脆性和焊接質(zhì)量不穩(wěn)定。
其工藝特點如下:
(1)采用增大的電極壓力(為相同板厚低碳鋼點焊時的1.5~1.7倍),調(diào)制焊接電流脈沖(即使用熱量遞增控制以減輕或避免內(nèi)噴濺)以防止點焊接頭宏觀缺陷(縮松、縮孔、裂紋)的產(chǎn)生。
(2)采用隨機多脈沖回火熱處理(回火脈沖次數(shù)n≥3),以防止點焊接頭顯微組織缺陷(硬脆馬氏體、過燒組織)的出現(xiàn),以及準確控制點焊接頭組織及其分布特征,使接頭高應力區(qū)獲得完全回火處理。
據(jù)報道,該工藝比通常采用的雙脈沖點焊工藝,可顯著提高接頭強度和疲勞性能。
1.3.2精密脈沖電阻對焊
該工藝可解決形位尺寸要求嚴格,焊接性差和接頭性能有特殊要求的精細零件對焊。
其工藝特點如下:
(1)采用調(diào)制焊接壓力(通過由直流電磁鐵為核心的電磁加壓機構(gòu)實現(xiàn)),使頂鍛開始時間和頂鍛力準確、及時。
(2)采用調(diào)制電流脈沖(焊接脈沖+后熱處理脈沖,后熱處理脈沖可為單脈沖、雙脈沖及多脈沖)。
(3)調(diào)制焊接壓力與調(diào)制電流脈沖可適當配合,組成最佳精密脈沖對焊焊接循環(huán),如圖3所示。
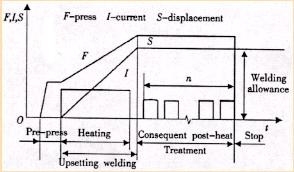
圖3 TiNi記憶合金精密脈沖對焊原理
據(jù)報道,該工藝可較好實現(xiàn)記憶合金(TiNi)、可淬硬合金以及熱物理性質(zhì)相差較大的異種金屬的對焊。
1.3.3導熱電阻縫焊
導熱電阻縫焊(Conductive Heat Resistance Seam Welding)是利用普通通用電阻焊機,通過鐵的電阻熱的傳導,進行鋁材的焊接,具有如下優(yōu)點:無熱裂紋缺陷;與電弧焊或其它電阻焊方法相比具有較少的內(nèi)部氣孔;高的焊接速度(高于普通電阻縫焊和電弧焊,低于激光焊);中等裝備成本;不需填充金屬或保護氣體。
1.4 電阻焊新設(shè)備
次級整流電阻焊機和逆變式電阻焊機是當今世界電阻焊機發(fā)展的主要方向;隨著現(xiàn)代控制理論與電子元器件發(fā)展,其技術(shù)是關(guān)鍵(低電壓大電流給次級整流帶來難度;控制的可靠性和精確性要求更高等)已基本解決。目前,逆變式電阻焊機是優(yōu)先發(fā)展的熱點。據(jù)統(tǒng)計,日本的Miyachi、Seiwa,歐洲的Messer、Tecna,北美的TJ Snow,韓國的Taesung,中國的天津七○七所等已有容量300KVA以下的該類焊機產(chǎn)品。圖4為逆變式電阻焊機原理圖。
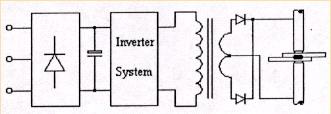
圖4 逆變式電阻焊機原理示意圖
逆變式電阻焊機具有以下特點:
(1)響應速度快,控制精度高。由于采用較高的逆變頻率(500~2000Hz),時間調(diào)節(jié)和反饋控制周期在1ms(1000Hz)以內(nèi),大大提高了焊接電流控制精度。
(2)體積小,重量輕。由于采用中頻的工作頻率,在相同的功率輸出時焊接變壓器體積和重量明顯減小,據(jù)報道,采用逆變式的一體式焊鉗其重量可減輕50%。
(3)三相負載平衡,功率因數(shù)高,節(jié)能。
(4)工藝優(yōu)勢明顯。焊接電流為脈動直流(且波紋度小),無交流過零不加熱工件的缺點,熱量集中能焊接各種材料。同時,電極壽命獲得延長。
目前,逆變式電阻焊機要繼續(xù)深入研究的主要問題是:
(1)大功率開關(guān)元件的不斷更新。IGBT(雙極型隔離柵晶體管)是發(fā)展大功率逆變式電阻焊機的首選開關(guān)元件,其單管額定電流可達300A,集射極耐壓高達1200V,可以采用邏輯電平直接驅(qū)動,實現(xiàn)了元件驅(qū)動的電壓控制。 #p#分頁標題#e#
(2)大功率整流二極管的不斷更新。由于次級整流元件的接入增加了焊機的功率損耗(約占整臺焊機輸出功率的28%),雖然采用肖特基二極管會得到改善,但仍存在輸出功率受到限制及其冷卻系統(tǒng)增加焊機體積和重量的問題。
(3)主電路拓撲結(jié)構(gòu)的不斷發(fā)展。應用于逆變焊接電源的主電路使用過以下拓樸結(jié)構(gòu),推輓.式逆變電路、全橋式逆變電路、半橋式逆變電路、單端式逆變電路等。各逆變電路都有自己的優(yōu)缺點,要根據(jù)實際應用條件而定。
(4)逆變電路控制方式的不斷改進。控制方式改進主要體現(xiàn)在逆變電路中功率開關(guān)管是以何種模式開斷的,即硬開關(guān)和軟開關(guān)。近年來,脈寬調(diào)制軟開關(guān)技術(shù)(SPWM)成為逆變控制系統(tǒng)的研究熱點,它綜合了傳統(tǒng)的脈寬調(diào)制技術(shù)和諧振技術(shù)的優(yōu)點,僅在功率器件換流瞬間,應用諧振原理,實現(xiàn)零電壓或零電流轉(zhuǎn)換,而在其余大部分時間采用恒頻脈寬調(diào)制方法,完成對電流輸出電壓或電流的控制,因此,開關(guān)器件所受的電流或電壓應力少。
逆變式電阻焊機特別適宜于機器人焊接和精密焊接。近年來,針對次級整流電阻焊機和逆變式電阻焊機均需要對焊接電流進行次級整流,就必然會存在因次級整流元件而帶來的一系列問題,國內(nèi)學者王清在對三相低頻電阻焊機深入研究的基礎(chǔ)上,開發(fā)了無次級整流直流電阻焊新技術(shù),并研制出一臺以工業(yè)控制計算機(IPC)為控制核心,以IGBT為功率開關(guān)元件,采用分段斬波控制方法的逆變式無次級整流直流電阻焊機樣機,工作原理見圖5。試驗表明,該機具有良好的點焊工藝性能。
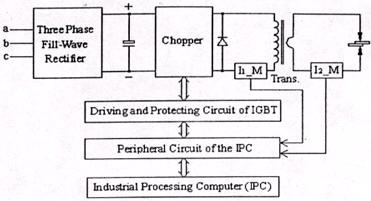
圖5 逆變式無次級整流直流電阻焊機電路原理圖
1.5新型點焊機器人
點焊機器人通常由操作機、控制器和點焊鉗等組成,現(xiàn)代點焊機器人特點是:
(1)采用逆變一體式點焊鉗,大大降低了機器人抓重。具有控制精度高、響應速度快、節(jié)能、焊接工藝性能好等顯著優(yōu)點。
(2)采用新型電極驅(qū)動機構(gòu)。近年出現(xiàn)的伺服式點焊鉗(槍),用伺服馬達作位置反饋,當機器人運行時,機器人控制伺服鉗作為其輔助軸之一,可實現(xiàn)電極加壓軟接觸及電極壓力實時調(diào)節(jié),在與焊接電流最佳配合后,顯著提高了點焊質(zhì)量和消除噴濺。例如這種MOTOMAN點焊機器人已在日本、美國和歐洲獲得應用。
(3)自動快速更換多種焊鉗技術(shù)。機器人帶有焊鉗儲存庫,可根據(jù)焊裝部位的不同要求或焊裝產(chǎn)品的變更,自動從儲存庫抓換所需焊鉗(圖6),增加了機器人的柔性。
(4)配備自動化的質(zhì)量和產(chǎn)量控制系統(tǒng),例如:機器人三維激光視覺系統(tǒng),數(shù)字攝像控制系統(tǒng),射線質(zhì)量檢測系統(tǒng)等,有利于焊接質(zhì)量的集中管理和控制。
(5)新型的離線示教機器人,可借助CAD/CAM獲取焊件構(gòu)造、焊接條件和機器人機構(gòu)等信息,進行離線示教,示教時間短,焊接質(zhì)量穩(wěn)定。
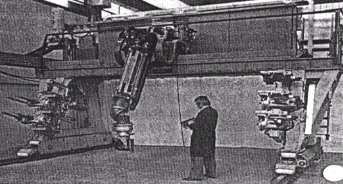
圖6 可自動更換焊鉗的點焊機器人
2 摩擦焊技術(shù)新發(fā)展
摩擦焊(Friction Welding),是在軸向壓力與扭矩作用下,利用焊接接觸端面之間的相對運動及塑性流動所產(chǎn)生的摩擦熱及塑性變形熱使接觸面及其近區(qū)達到粘塑性狀態(tài)并產(chǎn)生適當?shù)暮暧^塑性變形,然后迅速頂鍛而完成焊接的一種壓焊方法,主要由連續(xù)驅(qū)動摩擦焊、慣性摩擦焊、攪拌摩擦焊、線性摩擦焊、三體摩擦焊和摩擦堆焊等組成。摩擦焊是一種優(yōu)質(zhì)、高效、節(jié)能、無污染的固相連接方法。
2.1 攪拌摩擦焊(Friction Stir Welding, FSW)
FSW是英國焊接研究所(TWI)1991年推出的一項專利技術(shù),其原理見圖7。即焊接開始時,高速旋轉(zhuǎn)的攪拌頭上的特形指棒鉆入工件的接縫處,造成其與工件摩擦生熱,使被焊金屬成塑性狀態(tài)并攪拌金屬形成一個旋轉(zhuǎn)空腔,旋轉(zhuǎn)空腔隨摩擦頭向前移,被擠出的塑性金屬填入先前形成的空腔,冷卻后即形成致密的焊縫。在整個焊接過程中,空腔的產(chǎn)生與填滿連續(xù)進行,焊縫區(qū)金屬經(jīng)歷著被擠壓、摩擦生熱、塑性變形、轉(zhuǎn)移、擴散以及再結(jié)晶等。 #p#分頁標題#e#
(a) 攪拌摩擦焊原理 (b) 攪拌頭上的特形指棒 (c) 焊接現(xiàn)場
圖7 攪拌摩擦焊(FSW)
攪拌摩擦焊的優(yōu)點:
(1)可焊接板材及多種接頭形式(對接、角接、搭接和T形接頭等),可進行不同位置(平焊、立焊、仰焊和俯焊等)焊接。
(2)可用于焊接熔焊時有一定難度的材料,如鋁合金、鈦合金及銅鋁、鋼鋁、鋼銅、熱固性塑料/熱塑性塑料等異種材料。同時,也可焊接厚度變化材料、多層材料。鍛造與鑄造材料之間的焊接等。
(3)焊縫質(zhì)量高,接頭中不發(fā)生熱裂紋、氣孔等缺陷,接頭力學性能優(yōu)異。例如,與氬弧焊相比焊接2×××系列鋁合金,其接頭強度提高15%~20%,延伸率提高100%,斷裂韌度提高30%。同時,焊接變形小,甚至長焊縫變形也不大,殘余應力很低。
(4)焊接成本低。焊前準備要求低,允許接縫有薄氧化膜及附著雜質(zhì);不需焊后處理;無需填充材料和保護氣體等;
(5)焊接過程無熔化、無飛濺、無煙塵、低噪聲,是一環(huán)保型的節(jié)能連接技術(shù)。
攪拌摩擦焊的缺點主要是,施焊時焊件需剛性固定,需要有背墊,焊縫尾部有匙孔等,這些使FSW的工藝柔性受到限制。
鑒于FSW具有諸多顯著的優(yōu)點,近年來該技術(shù)及其工程應用的開發(fā)進展很快,英國TWI、美國愛迪生焊接研究所(EWI)、德國Stuttgart大學、瑞典ESAB公司、中國的北京航空工藝研究所等均作了大量工作,主要集中在:
(1)建立FSW模型。例如,英國劍橋大學的H.R.Shercliff、美國EWI的Z.Feng等開發(fā)了一種模擬FSW熱過程的加熱模型,利用該模型可以快速準確地計算出焊接工藝參數(shù),更好地了解該工藝的加熱和接合機理;國內(nèi)學者汪建華等人提出了一個基于三維熱彈塑性有限元分析的傳熱和力學計算模型,利用該模型可以了解FSW過程中溫度場,并首次預測了焊后的殘余應力和變形。
(2)改變攪拌頭形狀和材質(zhì),以適應不同材料焊接的需要。
(3)發(fā)展復雜接頭形式的FSW技術(shù),通過旋轉(zhuǎn)工件、采用數(shù)控式機器人以用于環(huán)狀焊縫、非線性焊縫和三維焊縫。
(4)發(fā)展輕質(zhì)鎂合金,以及鎂合金與鋁合金的焊接技術(shù),開發(fā)在汽車行業(yè)的應用。
攪拌摩擦點焊(Friction Stir Spot Welding,F(xiàn)SSW)是FSW中的特定形式,是針對汽車鋁結(jié)構(gòu)車身的連接而進行開發(fā)研究的。FSSW裝置安裝在機器人臂上,施焊時由機器人臂移到要焊部位,夾緊臂下降夾緊要焊的板,然后攪拌頭下降進行焊接,焊接結(jié)束后松開夾緊臂,整個裝置由機器人臂移到新的點焊位置,工作過程和完成的焊點如圖8所示。
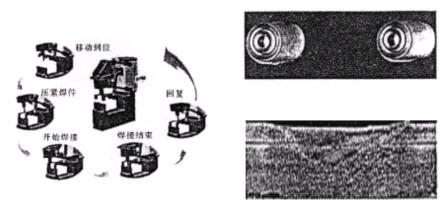
圖8 攪拌摩擦點焊(FSSW)
(左)FSSW裝置 (上)FSSW焊點外觀 (下)FSSW焊點橫截面
FSSW焊點實際上有一段長度L(L=πD2/d+2.5mm,D是該板材電阻點焊時焊點直徑,d是特形指棒直徑),試驗表明,AA6061-T4板材的FSSW焊點表面光滑,內(nèi)部無缺陷,有較好的靜載和動載強度。
2.2 線性摩擦焊(Linear Friction Welding, LFW)
LFW焊接過程如圖9所示:摩擦副中的一側(cè)工件被一對往復機構(gòu)驅(qū)動著相對于另一側(cè)被夾緊的工件表面作相對運動,并在其軸向施加壓力下,隨著摩擦運動的進行,摩擦表面被清理并產(chǎn)生摩擦熱,摩擦表面的金屬逐漸達粘塑性狀態(tài)并產(chǎn)生變形,形成飛邊。然后,停止往復運動并施加頂鍛力,完成焊接。
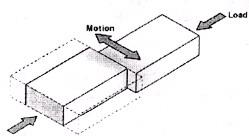
圖9 線性摩擦焊示意圖
線性摩擦焊的優(yōu)點:
(1)可焊接方形、圓形、多邊形截面的金屬或塑料工件。配合合適的工夾具還可焊接更不規(guī)則的構(gòu)件,如葉片與渦輪盤的焊接(圖10)。 #p#分頁標題#e#
(2)固態(tài)焊接,金屬不熔化和熱影響區(qū)窄;低應力和小變形,高完整性;焊縫的結(jié)構(gòu)強度與彈性性能與基體金屬相同。
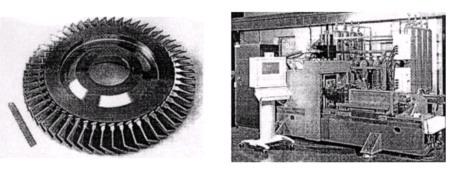
圖10 LFW焊接的整體葉盤 圖11 LinFricTM型線性摩擦焊機
(3)焊接過程可完全機械和自動控制,可靠性高(圖11)。因此,可實現(xiàn)一次焊接多零件,亦可用于生產(chǎn)線上。
目前,已用LFW焊接不銹鋼、鋁、鈦和鎳合金,甚至金屬間化合物( —TiAl)以及異種金屬。劍橋焊接研究所已經(jīng)在研究采用LFW技術(shù)制造整體葉輪,并實現(xiàn)航空發(fā)動機輪轂與發(fā)動機體的整體焊接。西北工業(yè)大學開展了整體葉盤LFW焊接過程中溫度場、應力場的計算機數(shù)值模擬及焊接過程的擬實分析與驗證實驗等工作。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數(shù)據(jù)處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎(chǔ)培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計案例教程中文版AutoCAD 建筑設(shè)計案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機械A(chǔ)utoCAD 項目教程 第3版 [繆希偉 主編] 2012年P(guān)DF