1. 3結(jié)構(gòu)分解及型轉(zhuǎn)化單元的分析模型
識(shí)別出結(jié)構(gòu)分解所需要的信息后,結(jié)構(gòu)分解路線的優(yōu)選原則將機(jī)構(gòu)分解為機(jī)架、主動(dòng)件和有序單元組(虛擬單構(gòu)件、雙桿組、約束單構(gòu)件).型轉(zhuǎn)化單元共有37種,其數(shù)學(xué)模型可以歸納為26種.因此,構(gòu)造一個(gè)單元基類CUnit來(lái)定義型轉(zhuǎn)化單元運(yùn)動(dòng)分析的共同屬性和方法,再?gòu)膯卧愔信缮龈鞣N單元類對(duì)象.通過(guò)基類中虛函數(shù)的定義,引人多態(tài)機(jī)制,便于程序擴(kuò)充.
1.3運(yùn)動(dòng)分析與仿真的實(shí)現(xiàn)
機(jī)構(gòu)分解完成后,通過(guò)調(diào)用主動(dòng)件及各型轉(zhuǎn)化單元的運(yùn)動(dòng)分析子程序,從而實(shí)現(xiàn)對(duì)整個(gè)機(jī)構(gòu)的運(yùn)動(dòng)分析.首先調(diào)用Component:: GetXform來(lái)得到該構(gòu)件的初始位置的位姿矩陣,當(dāng)主動(dòng)件位置發(fā)生變化的時(shí)候,順序調(diào)用各型轉(zhuǎn)化單元的運(yùn)動(dòng)分析子程序,得到該位置的分析結(jié)果,然后調(diào)用Component::SetXform重新設(shè)置構(gòu)件的位姿矩陣,這樣的話,運(yùn)動(dòng)分析的結(jié)果就直接為仿真服務(wù),從而實(shí)現(xiàn)動(dòng)態(tài)仿真
2算例
以下面六桿機(jī)構(gòu)為例說(shuō)明機(jī)構(gòu)的分解和分析仿真(機(jī)構(gòu)三維實(shí)體模型和機(jī)構(gòu)簡(jiǎn)圖分別見(jiàn)圖5和圖6).

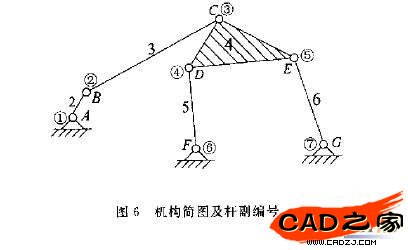
選取的計(jì)算參數(shù):主動(dòng)件AB轉(zhuǎn)動(dòng)步長(zhǎng)為10°
桿組分解結(jié)果:型轉(zhuǎn)化數(shù)為1;虛擬單構(gòu)件為BC桿,約束單構(gòu)件為EG桿,其余兩桿為雙桿組.
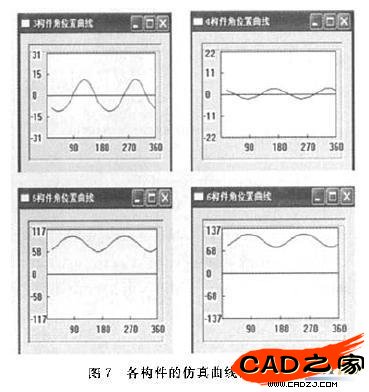
經(jīng)程序計(jì)算,得到各桿的仿真曲線如圖7所示
3結(jié)論
文中研究了在SolidWorks平臺(tái)上開(kāi)發(fā)面向?qū)ο蟮倪B桿機(jī)構(gòu)參數(shù)化實(shí)體運(yùn)動(dòng)仿真系統(tǒng)的方法.結(jié)合國(guó)內(nèi)先進(jìn)的機(jī)構(gòu)分析理論和SolidWorks強(qiáng)大的造型功能及其提供的API對(duì)象,開(kāi)發(fā)出了一套三維實(shí)體化的通用連桿機(jī)構(gòu)運(yùn)動(dòng)分析和仿真系統(tǒng).
所開(kāi)發(fā)的系統(tǒng)的特點(diǎn).
1)完全基于三維實(shí)體的分析.運(yùn)動(dòng)分析中產(chǎn)生的大量數(shù)據(jù)以動(dòng)態(tài)模擬、曲線圖、數(shù)據(jù)表等形式表現(xiàn)出來(lái),增強(qiáng)了連桿機(jī)構(gòu)設(shè)計(jì)的直觀性,并為連桿機(jī)構(gòu)設(shè)計(jì)提供了全面準(zhǔn)確的參考數(shù)據(jù).
2)由于參數(shù)化構(gòu)件模板庫(kù)的建立,大大簡(jiǎn)化了機(jī)構(gòu)實(shí)體建模的過(guò)程;而裝配特征隱含了運(yùn)動(dòng)副的信息.省略了交互定義運(yùn)動(dòng)副的過(guò)程.
3)采用型轉(zhuǎn)化及廣義型轉(zhuǎn)化的理論,將機(jī)構(gòu)運(yùn)動(dòng)分析方程的維數(shù)降至最低,提高了求解的速度;模型構(gòu)造與求解算法穩(wěn)定可靠,不會(huì)出現(xiàn)系統(tǒng)崩潰現(xiàn)象.
4)具有良好的用戶界面和適時(shí)的交互能力,程序的自動(dòng)識(shí)別能力強(qiáng),用戶交互信息少,操作方便,對(duì)用戶的專業(yè)要求很低
5)程序的通用性好,不受機(jī)構(gòu)復(fù)雜性和自由度的限制.