為了滿足日益增長的食品、飲料、化工產(chǎn)品包裝的需要,我們研制了JK-20型經(jīng)濟(jì)型數(shù)控沖床,解決了輕工行業(yè)中利用普通沖床進(jìn)行板料沖壓加工生產(chǎn)率低、耗材多、易發(fā)生工傷事故等問題。但當(dāng)在該數(shù)控沖床上沖壓印花板料時(shí),要求印花位于沖裁件中心,這樣對該數(shù)控沖床的定位精度提出了較高的要求。為了解決該經(jīng)濟(jì)型開環(huán)數(shù)控沖床定位精度低的問題,我們分析了其定位誤差產(chǎn)生的原因,根據(jù)沖壓加工工藝特點(diǎn),預(yù)先對其工作臺的定位誤差進(jìn)行動態(tài)測定,利用軟件進(jìn)行定位誤差補(bǔ)償,提高其加工精度。
2定位誤差產(chǎn)生的原因
由功率步進(jìn)電機(jī)通過絲杠驅(qū)動的工作臺產(chǎn)生的定位誤差主要有:
(1)由絲杠驅(qū)動引起的工作臺x、y坐標(biāo)方向全程分布隨位移非線性變化的誤差。這一誤差在一定時(shí)間內(nèi)具有相對的穩(wěn)定性,但隨著系統(tǒng)投入使用的時(shí)間增長、傳動副的磨損等還會發(fā)生變化。
(2)由絲杠產(chǎn)生的反向間隙誤差;
(3)由x、y軸導(dǎo)軌不垂直產(chǎn)生的誤差;
(4)由功率步進(jìn)電機(jī)失步、過沖產(chǎn)生的誤差。引起步進(jìn)電機(jī)失步和過沖的原因?yàn)椋哼^載,起、停過程中的升降速運(yùn)動不合適,靜態(tài)鎖定電流值小。當(dāng)選擇步進(jìn)電機(jī)時(shí),使系統(tǒng)的負(fù)載力矩不超過步進(jìn)電機(jī)的矩頻特性線,并留有一定余量,同時(shí)選擇適當(dāng)?shù)纳⒔殿l規(guī)律和曲線與靜態(tài)鎖定電流,這樣步進(jìn)電機(jī)很少出現(xiàn)失步和過沖現(xiàn)象。因此我們只對前三項(xiàng)定位誤差進(jìn)行分析并加以補(bǔ)償。
3定位誤差補(bǔ)償
3.1非線性位移誤差補(bǔ)償
由絲杠驅(qū)動引起的工作臺x、y坐標(biāo)方向全程分布的非線性位移誤差在一定時(shí)間內(nèi)是一常值誤差,因此工作臺安裝調(diào)整好后,預(yù)先對工作臺定位誤差進(jìn)行動態(tài)測量和處理。測量可采用感應(yīng)同步器及數(shù)顯裝置或激光測量裝置等。在加工中可根據(jù)預(yù)先測量的定位誤差進(jìn)行誤差補(bǔ)償。
由于其非線性位移誤差曲線基本不變性,因此我們可根據(jù)預(yù)先測量的定位誤差,按一定精度在x軸上取一系列離散點(diǎn),根據(jù)離散點(diǎn)的誤差將其補(bǔ)償值(以脈沖當(dāng)量為單位)建立成表格,存入計(jì)算機(jī)內(nèi)存。如某點(diǎn)的誤差為2.1個(gè)脈沖當(dāng)量,我們可取補(bǔ)償值為2個(gè)脈沖當(dāng)量(補(bǔ)償脈沖當(dāng)量取誤差的整數(shù)倍,即將誤差值(以脈沖當(dāng)量計(jì))四舍五入取其整數(shù))。即工作臺移動到該點(diǎn)時(shí),控制脈沖減少2個(gè)脈沖。這樣理論上可將工作臺精度控制在0.5個(gè)脈沖當(dāng)量內(nèi)。
根據(jù)以上補(bǔ)償原理可對工作臺位移逐點(diǎn)比較補(bǔ)償,但當(dāng)逐點(diǎn)比較補(bǔ)償時(shí),要占用微機(jī)的大量存取空間,還要有足夠的運(yùn)算速度,這樣對由單片機(jī)開發(fā)的系統(tǒng)在實(shí)際應(yīng)用中有一定困難。考慮到?jīng)_床沖壓加工是點(diǎn)位控制的特點(diǎn),只需要對工件定位點(diǎn)(沖壓點(diǎn))進(jìn)行補(bǔ)償。基于此沖壓加工特點(diǎn),給微機(jī)軟件補(bǔ)償定位誤差帶來了很大的方便。
設(shè)工作臺線性誤差如圖1a所示,圖1b為加工時(shí)的沖壓點(diǎn)x1,x2,…,xk,xk+1…由圖1a可建立非線性位移誤差補(bǔ)償表。
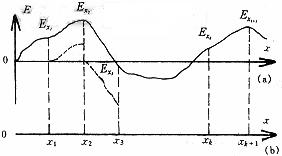
圖1正向送料定位非線性位移誤差補(bǔ)償
當(dāng)工作臺在x方向送料時(shí),假設(shè)起始點(diǎn)從絕對原點(diǎn)開始,在x1,x2,…,xk,xk+1,…沖壓加工,當(dāng)沖壓x1點(diǎn)時(shí),微機(jī)應(yīng)發(fā)出的理論脈沖數(shù)為:
Lx1=X1/δ
式中δ——脈沖當(dāng)量。
由于非線性位移誤差的存在,當(dāng)微機(jī)發(fā)出Lx1個(gè)脈沖數(shù)時(shí),x方向送料不在x1點(diǎn)。查表得x1點(diǎn)的非線性位移誤差為Ex1(以脈沖當(dāng)量計(jì)),微機(jī)應(yīng)發(fā)出的實(shí)際脈沖數(shù)為:
LB(X1)=Lx1-Ex1 (2)
由于x1點(diǎn)的誤差補(bǔ)償,x1點(diǎn)到x2點(diǎn)的非線性誤差曲線平移成圖1a中的虛線。因此在沖壓x2點(diǎn)時(shí),微機(jī)應(yīng)發(fā)出的實(shí)際脈沖數(shù)為:
LB(X2)=(Lx2-Lx1)-(Ex2-Ex1)
=Lx2-LB(x1)-Ex2
同理,當(dāng)點(diǎn)X2的誤差補(bǔ)償后,x2點(diǎn)到x3點(diǎn)的非線性誤差曲線就變成圖1a中的虛線。因此在沖壓x3點(diǎn)時(shí),微機(jī)應(yīng)發(fā)出的實(shí)際脈沖數(shù)為: #p#分頁標(biāo)題#e#
LB(x3)=(Lx3-Lx2)-(Ex3-Ex2)
=Lx3-[LB(x2)+LB(x1)]-Ex3 (4)
由歸納法可求得:當(dāng)沖壓任意點(diǎn)xk,微機(jī)應(yīng)發(fā)出的實(shí)際脈沖數(shù),即x方向誤差補(bǔ)償式為:

式中LB(xk)——x方向從k-1點(diǎn)到k點(diǎn)經(jīng)補(bǔ)償后需走的實(shí)際位移(以脈沖量計(jì))
Lxk——x方向當(dāng)前點(diǎn)(k點(diǎn))的理論坐標(biāo)值(距坐標(biāo)原點(diǎn))
LB(xi)——x方向當(dāng)前k點(diǎn)以前,從i-1點(diǎn)到i點(diǎn),經(jīng)補(bǔ)償后需走的實(shí)際位移
Exk——x方向非線性誤差曲線上對應(yīng)于點(diǎn)xk的誤差值
從式(5)可知,LB(xk)只與當(dāng)前點(diǎn)的理論坐標(biāo)值、當(dāng)前點(diǎn)的誤差值和當(dāng)前點(diǎn)以前所有沖壓點(diǎn)補(bǔ)償后實(shí)際從其前一沖壓點(diǎn)到該點(diǎn)的實(shí)際位移的和,當(dāng)前點(diǎn)的誤差值可從建立的表格中查出,如果表格中該點(diǎn)不存在,利用其表格中的前后點(diǎn)用插補(bǔ)法求出,當(dāng)前點(diǎn)以前所有沖壓點(diǎn)補(bǔ)償后實(shí)際從其前一沖壓點(diǎn)到該點(diǎn)的實(shí)際位移的和可設(shè)一累加器存儲。因此用此式進(jìn)行誤差補(bǔ)償是很方便的。
根據(jù)以上原理,同樣可推導(dǎo)出y方向誤差補(bǔ)償?shù)钠毡槭剑?/FONT>

誤差補(bǔ)償式(5)、(6)是在工作臺從絕對原點(diǎn)開始沿正向送料定位加工的情況下推導(dǎo)得到的。但實(shí)際加工中,工作臺不但從絕對原點(diǎn)開始沿正向送料定位加工,而且要沿負(fù)向送料定位加工。一般送料定位加工過程如圖2所示。在一般情況下誤差補(bǔ)償式(5)、(6)是否成立,下面就給以討論。
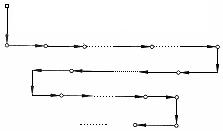
□絕對原點(diǎn) ○相對加工點(diǎn)
↓Y送料定位方向→X送料定位方向
圖2沖壓送料定位加工過程示意圖
如圖3a,工作臺由絕對原點(diǎn)開始沿正向送料定位加工,定位加工點(diǎn)為x1,x2,…,xn,n點(diǎn)沖壓加工后,y向送料,再從n點(diǎn)沿負(fù)向送料定位加工,定位加工點(diǎn)為xn+1,xn+2,…,xn+k…。當(dāng)加工n點(diǎn)時(shí):

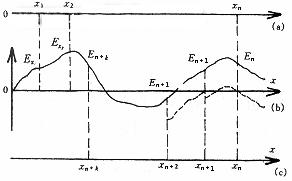
圖3送料定位非線性誤差補(bǔ)償
由于n點(diǎn)的誤差補(bǔ)償,n點(diǎn)到n+1點(diǎn)的誤差曲線平移到圖3b中的虛線,送料定位加工n+1點(diǎn)時(shí),微機(jī)應(yīng)發(fā)出的實(shí)際脈沖數(shù)為:

由n+1點(diǎn)的誤差補(bǔ)償,n+1點(diǎn)到n+2點(diǎn)的誤差曲線平移到圖3b中的虛線,送料定位加工n+2點(diǎn)時(shí),微機(jī)應(yīng)發(fā)出的實(shí)際脈沖數(shù)為:

由歸納法可得,當(dāng)送料定位加工任一點(diǎn)n+k時(shí),微機(jī)應(yīng)發(fā)出的實(shí)際脈沖數(shù),即x方向誤差補(bǔ)償式為:

由此可知式(5)、(6)具有普遍意義。
3.2反向間隙誤差補(bǔ)償 #p#分頁標(biāo)題#e#
由于絲杠螺母副之間的間隙存在,當(dāng)工作臺反向時(shí),必產(chǎn)生反向間隙誤差而影響到工作臺送料定位精度。絲杠螺母副之間的間隙具有兩個(gè)特點(diǎn):
(1)具有相對的穩(wěn)定性,即在一定范圍內(nèi)間隙是一個(gè)常數(shù);
(2)隨著機(jī)械傳動的磨損而相應(yīng)增加。
因此,預(yù)先測出其間隙,利用反向間隙的統(tǒng)計(jì)平均值,對其產(chǎn)生的定位誤差進(jìn)行軟件補(bǔ)償。在軟件設(shè)計(jì)時(shí),只需設(shè)計(jì)一方向寄存器,用來判斷工作臺是否換向。采用不換向不補(bǔ)償,每換向一次補(bǔ)償一次來消除絲杠螺母的反向間隙誤差。
3.3x、y軸不垂直產(chǎn)生的定位誤差補(bǔ)償
前面分析了由絲杠驅(qū)動引起的工作臺x、y坐標(biāo)方向全程分布的非線性位移誤差的補(bǔ)償。當(dāng)x、y兩軸不垂直而產(chǎn)生的定位誤差補(bǔ)償沒包括在內(nèi)。考慮兩軸不垂直而引起的幾何誤差是個(gè)線性函數(shù),其值為:
E′xn=Lyn.α/2 (11)
E′yn=Lxn.α/2 (12)
將E′xn、E′yn疊加到式(5)、(6)的Exn、Eyn中,就可同時(shí)消除x、y軸不垂直產(chǎn)生的定位誤差。這樣定位誤差的補(bǔ)償式即為:


4結(jié)論
此定位誤差補(bǔ)償方法用在我們開發(fā)的兩臺數(shù)控沖床上,該數(shù)控沖床步進(jìn)電機(jī)脈沖當(dāng)量為1/15mm,當(dāng)沖壓75mm的印花圓盒和60mm的印花圓盒蓋時(shí),每分鐘沖壓180次,其定位精度達(dá)到±0.10mm,滿足了生產(chǎn)廠家的技術(shù)指標(biāo)。
此定位誤差補(bǔ)償方法簡單可靠,容易用軟件編程實(shí)現(xiàn),在不增加任何硬件的基礎(chǔ)上,可在一定程度上提高數(shù)控沖床的定位精度。當(dāng)系統(tǒng)投入使用一定時(shí)間后,可重新對其工作臺定位誤差動態(tài)測量,修正表格,消除傳動件磨損引起的定位誤差的變化。
本文以數(shù)控沖床為例,但其應(yīng)用可推廣到所有點(diǎn)位數(shù)控機(jī)床的誤差補(bǔ)償。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF