3機(jī)械手建模與動(dòng)態(tài)仿真分析
3.1機(jī)械手建模
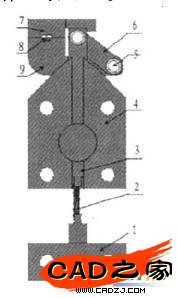
將初步確定尺寸的機(jī)構(gòu)各件用SolidWorks建立模型,然后將其裝配。并對(duì)部分尺寸進(jìn)行修正,得機(jī)械手三維圖,如圖2所示。
機(jī)械手夾持孔依據(jù)測(cè)得的秧苗莖桿平均尺寸確定。據(jù)測(cè)定,黃瓜苗橫向1. 72 mm,縱向1.76 mm,南瓜苗橫向2.73 mm,縱向3.79 mm,因而確定穗木夾持孔為半徑1.7 mm圓孔,砧木夾持孔為長(zhǎng)3.8mm、寬2.7mm的矩形孔。另外,在夾持爪內(nèi)側(cè)與苗接觸部分加裝彈性好、表面粗糙的橡膠材料,以?shī)A緊秧苗,這樣并不影響嫁接秧苗的成活率。這是因?yàn)橛醒芯勘砻鳎瑝嚎s變形小于20%時(shí),對(duì)秧苗的成活率影響非常小。
3.2機(jī)械手動(dòng)態(tài)仿直與分析
為了檢驗(yàn)機(jī)械手的動(dòng)作和運(yùn)動(dòng)情況,用SolidWorks軟件的COSMOSMotion插件對(duì)其進(jìn)行動(dòng)態(tài)分析,仿真時(shí)不考慮銷(xiāo)軸的影響,銷(xiāo)軸聯(lián)接的兩個(gè)部件間直接定義為旋轉(zhuǎn)副。
3.2.1定義約束和載荷。彈簧座板和掌板固定于地,連桿和內(nèi)指、連桿和推桿、內(nèi)指和掌板定義旋轉(zhuǎn)副,推桿和掌板定義平移副。彈簧座板和推桿之間定義線性彈簧,彈簧剛度6.629 N·mm,長(zhǎng)度20 mm,直徑4 mm,絲徑1 mm。在推桿上施加一個(gè)30 N的力,力的方向沿推桿。
3.2.2進(jìn)行干涉檢查和仿真。單擊菜單"運(yùn)動(dòng)"~"干涉檢查"選擇機(jī)械手整個(gè)模型進(jìn)行干涉檢查,經(jīng)檢查機(jī)械手各件間不存在干涉。然后,單擊菜單"運(yùn)動(dòng)"~"智能構(gòu)建器"~"仿真",設(shè)置仿真"持續(xù)時(shí)間"為0.1 s,"幀的數(shù)目"為500,進(jìn)行仿真,并將其運(yùn)動(dòng)過(guò)程制成AVI格式的動(dòng)畫(huà)演示結(jié)果表明,各機(jī)構(gòu)部件的動(dòng)作符合設(shè)計(jì)要求。
3.2.3仿真與結(jié)果的輸出。為了確定秧苗夾持點(diǎn)的運(yùn)動(dòng)和落苗空間,跟蹤內(nèi)外指夾苗點(diǎn)軌跡并將其"輸出CSV",用Excel將數(shù)據(jù)文件打開(kāi),并將數(shù)據(jù)傳人Matlab,繪制出軌跡曲線如圖3,4。
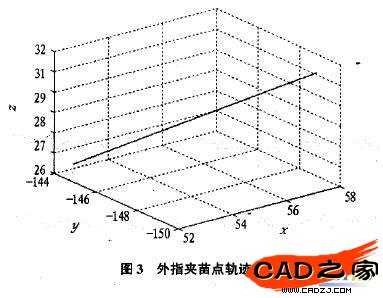
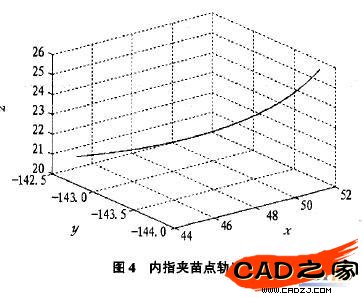
從內(nèi)外指夾苗點(diǎn)軌跡可見(jiàn),外指最大位移9 mm,內(nèi)指塌大位移7 mm,喂入苗的空間是它們的和16 mm,不僅可以保證苗的喂入,同時(shí)也應(yīng)滿足苗嫁接完成后下落的需要。
4結(jié)論
根據(jù)嫁接機(jī)的總體工藝要求和嫁接用黃瓜苗、南瓜苗跳物理機(jī)械性質(zhì),設(shè)計(jì)了嫁接機(jī)械手的結(jié)構(gòu),并用SolidWorks軟件建模,用COSMOSMotion插件進(jìn)行了動(dòng)態(tài)仿真分析,證明該機(jī)構(gòu)及動(dòng)作可滿足設(shè)計(jì)要求。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書(shū)Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書(shū) AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF