3模型庫的建立
建立模型庫是指給定非標(biāo)準(zhǔn)件基本參數(shù),自動(dòng)生成三維模型。例如在建立圓柱齒輪的三維模型時(shí),只需要輸人齒數(shù)、模數(shù)、螺旋角等幾個(gè)參數(shù)后,就能在solidWorks中自動(dòng)生成用戶所需的三維模型。對(duì)于標(biāo)準(zhǔn)件可以把它的規(guī)格、型號(hào)放在一個(gè)數(shù)據(jù)庫中,直接創(chuàng)建標(biāo)準(zhǔn)件數(shù)據(jù)庫,注意數(shù)據(jù)庫中數(shù)據(jù)的單位應(yīng)該和計(jì)算過程中數(shù)據(jù)單位保持一致,避免邏輯錯(cuò)誤,利用數(shù)據(jù)庫當(dāng)中存儲(chǔ)的數(shù)據(jù)可直接建立三維模型。用ADO實(shí)現(xiàn)VC和數(shù)據(jù)庫之間的數(shù)據(jù)讀寫,ADO中的編程模型一般由一個(gè)動(dòng)作序列組成,步驟為:①接到一個(gè)數(shù)據(jù)源;②確定對(duì)該數(shù)據(jù)源的一個(gè)查詢;③執(zhí)行該查詢;④把查詢數(shù)據(jù)檢索到一個(gè)能夠在C++代碼中很容易訪問的對(duì)象中;⑤如果需要,則更新該數(shù)據(jù)源,以反映對(duì)該數(shù)據(jù)的編輯;⑥提供檢測(cè)錯(cuò)誤的一般方法。
對(duì)于連桿類等具有一系列尺寸的零件,只需要改變長(zhǎng)短,無需改動(dòng)其他尺寸。對(duì)于這類零件采用系列零件設(shè)計(jì)表技術(shù),它是SolidWorks和Excel軟件無縫集成的表現(xiàn),先生成一個(gè)連桿,然后調(diào)用SolidWorks中的零件設(shè)計(jì)表模塊,把變動(dòng)的系列尺寸直接輸入到Excel中保存起來,與此同時(shí),在SolidWorks的環(huán)境管理器中生成與之對(duì)應(yīng)的模型,當(dāng)需要某長(zhǎng)度的模型時(shí),只需雙擊它重建模型即可馬上生成。這樣可以方便用戶隨時(shí)調(diào)用不同尺寸的桿件進(jìn)行機(jī)構(gòu)拼裝用戶在拼裝機(jī)構(gòu)的過程中如果沒有需要的連桿或其他零件,那么可利用SolidWorks軟件新建一個(gè)模型后把它放人到模型庫中即可,因而不會(huì)受到實(shí)物的限制,靈活度非常高。
4機(jī)構(gòu)方案的擬定及其評(píng)價(jià)方法
在擬定方案的時(shí)候,運(yùn)用知識(shí)庫中存儲(chǔ)的信息對(duì)初始機(jī)構(gòu)進(jìn)行創(chuàng)新方案分析,如果以前有類似的方案,則用戶可以繼續(xù)使用,還可在此基礎(chǔ)上進(jìn)行改進(jìn)創(chuàng)新,這樣可以提高效率。對(duì)于以前沒有的方案,首先可以從機(jī)構(gòu)的功能目標(biāo)人手,按其工作原理擬訂方案,其次對(duì)機(jī)構(gòu)進(jìn)行選型組合。例如,可以完成勻速轉(zhuǎn)動(dòng)的機(jī)構(gòu)有:連桿機(jī)構(gòu)、齒輪機(jī)構(gòu)、行星輪系等;用于非勻速轉(zhuǎn)動(dòng)的機(jī)構(gòu)有:連桿機(jī)構(gòu)、非圓齒輪機(jī)構(gòu)、撓性件傳動(dòng)機(jī)構(gòu);往復(fù)移動(dòng)的機(jī)構(gòu)有:連桿機(jī)構(gòu)、齒輪齒條機(jī)構(gòu)、凸輪機(jī)構(gòu)、楔塊機(jī)構(gòu)、螺旋機(jī)構(gòu)等。一般情況下,可以找到相應(yīng)的機(jī)構(gòu)來滿足用戶需要的運(yùn)動(dòng)。在確定基本機(jī)構(gòu)后,要對(duì)基本機(jī)構(gòu)進(jìn)行組合,機(jī)構(gòu)的組合是指在機(jī)構(gòu)選型的基礎(chǔ)上,根據(jù)功能目標(biāo)或工藝動(dòng)作的各種需要,組合創(chuàng)新機(jī)構(gòu)系統(tǒng)。對(duì)于已經(jīng)給出的方案有以下5方面評(píng)價(jià)內(nèi)容:功能性、經(jīng)濟(jì)性、安全性、可操作性、舒適性。其評(píng)價(jià)方法是:采用各種功能指標(biāo)量化法,即把參評(píng)的各項(xiàng)功能指標(biāo)分別乘以加權(quán)系數(shù)制定出評(píng)價(jià)函數(shù):先列出每一項(xiàng)評(píng)價(jià)指標(biāo)并把它進(jìn)行量化,然后根據(jù)每項(xiàng)指標(biāo)的重要程度分別賦予不同的加權(quán)系數(shù):

在具體實(shí)施方案時(shí),用戶畫出機(jī)構(gòu)簡(jiǎn)圖,從模型庫中調(diào)人所需的模型進(jìn)行虛擬裝配,讓系統(tǒng)按標(biāo)準(zhǔn)對(duì)機(jī)構(gòu)方案進(jìn)行分析驗(yàn)證,檢查其是否達(dá)到滿意的程度,如果滿意則可以進(jìn)行實(shí)際裝配,否則,重新選擇或者改進(jìn)方案,重新虛擬裝配直到得出滿意的運(yùn)動(dòng)方案為止。
5虛擬裝配與構(gòu)件之間的干涉檢測(cè)
用戶根據(jù)已經(jīng)選定的機(jī)構(gòu)運(yùn)動(dòng)方案確定需要用到的各種虛擬零件,將他們共同保存在磁盤的某一個(gè)文件夾中,打開SolidWorks軟件,新建一裝配體文件,將選好的零件依次插人到裝配體文件中,在零件之間添加相應(yīng)的裝配配合關(guān)系即可。例如:零件之間是通過鉸接裝配,則可添加轉(zhuǎn)動(dòng)副;如果是平面接觸,則添加移動(dòng)副。各構(gòu)件之間的裝配關(guān)系及其運(yùn)動(dòng)副關(guān)系定義如下:若是轉(zhuǎn)動(dòng)副,則在兩零件連接處添加端面貼合和同軸心關(guān)系;若是移動(dòng)副,則在兩零件接觸處添加平面貼合關(guān)系。機(jī)架和導(dǎo)軌等固定不動(dòng)的構(gòu)件通過右擊SolidWorks特征管理樹(Feature manager)中相應(yīng)零件的實(shí)體名,在彈出的菜單內(nèi)選擇"固定"來實(shí)現(xiàn)。由于SolidWorks是基于Windows開發(fā)出來的,并且它含有尺寸驅(qū)動(dòng)功能,用戶利用這個(gè)功能可以對(duì)已經(jīng)建好的裝配模型隨時(shí)修改。當(dāng)它修改某一個(gè)尺寸時(shí),其他的一些關(guān)聯(lián)尺寸也會(huì)隨之發(fā)生相應(yīng)的改變,而不必拆卸零件重新裝配,這在實(shí)物裝配中是不能實(shí)現(xiàn)的。完成虛擬裝配后進(jìn)行干涉檢查,例如,檢查一個(gè)平面連桿機(jī)構(gòu)在同一平面的兩個(gè)轉(zhuǎn)動(dòng)副之間是否發(fā)生位置千涉,直觀檢查干涉情況的方法是拖動(dòng)其中某個(gè)構(gòu)件觀察各構(gòu)件在運(yùn)動(dòng)中是否發(fā)生位置重疊或者桿件之間是否發(fā)生碰撞,如果發(fā)生這種情況,則需要調(diào)整機(jī)構(gòu)中的某些參數(shù)使之避免干涉。
6機(jī)構(gòu)的運(yùn)動(dòng)與動(dòng)力仿真
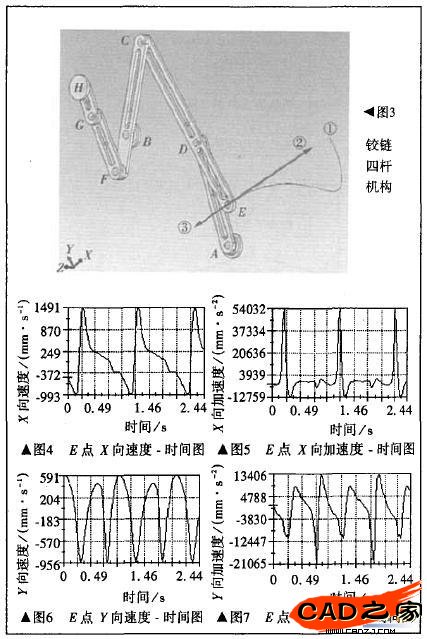
機(jī)構(gòu)的運(yùn)動(dòng)仿真是指在每一運(yùn)動(dòng)時(shí)刻,各個(gè)構(gòu)件在空間中的位置用計(jì)算機(jī)實(shí)時(shí)顯示出來。其方法有兩種:①圖解法,把每一個(gè)時(shí)刻機(jī)構(gòu)的狀態(tài)繪制出來,通過它來確定機(jī)構(gòu)某點(diǎn)在此刻的位置,這種方法的精度不高;②解析法,它是根據(jù)機(jī)構(gòu)的幾何關(guān)系利用封閉矢量的方法計(jì)算出點(diǎn)的位置。因而,運(yùn)用解析法和計(jì)算機(jī)相結(jié)合就可以計(jì)算出桿上某一點(diǎn)不同時(shí)刻的不同位置。由于各個(gè)構(gòu)件在原裝配關(guān)系中有各種約束關(guān)系,機(jī)構(gòu)本身特性也就確定了,而機(jī)構(gòu)固定不動(dòng)的零件放在空間的任何位置不會(huì)改變機(jī)構(gòu)上某點(diǎn)運(yùn)動(dòng)軌跡的形狀。完成運(yùn)動(dòng)分析之后,為了判斷所設(shè)計(jì)機(jī)構(gòu)特性的優(yōu)劣,需要對(duì)機(jī)構(gòu)的動(dòng)力特性加以分析,提取感興趣點(diǎn)進(jìn)行位置、速度和加速度分析以便作出機(jī)構(gòu)特性優(yōu)劣的最后評(píng)判。如圖3所示曲線①是E點(diǎn)的運(yùn)動(dòng)軌跡,帶箭頭的直線②為E點(diǎn)瞬時(shí)速度方向,帶箭頭的直線③為E點(diǎn)瞬時(shí)加速度方向。圖4一圖7分別是E點(diǎn)X向速度、加速度和Y向速度、加速度圖。
7結(jié)論
虛擬機(jī)構(gòu)創(chuàng)新實(shí)踐系統(tǒng)可以幫助用戶快速地完成設(shè)計(jì)任務(wù),通過可視化的運(yùn)動(dòng)和動(dòng)力學(xué)分析,在線對(duì)機(jī)構(gòu)方案進(jìn)行修改,從而整理出最優(yōu)的方案。因此,本系統(tǒng)可以培養(yǎng)用戶對(duì)機(jī)構(gòu)運(yùn)動(dòng)方案的整體認(rèn)識(shí),培養(yǎng)用戶的創(chuàng)新意識(shí)、綜合設(shè)計(jì)及工程實(shí)踐動(dòng)手能力。用戶在機(jī)構(gòu)拼裝的過程中熟悉機(jī)構(gòu)及機(jī)械設(shè)計(jì)中出現(xiàn)的典型問題,通過分析,解決問題,可以把運(yùn)動(dòng)方案中的一些基本知識(shí)點(diǎn)融會(huì)貫通,對(duì)機(jī)構(gòu)系統(tǒng)的運(yùn)動(dòng)特性有一個(gè)更加深人的理解。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF