2基于SolidWorks-VRML實現虛擬現實的精確建模
2.1工業機器人簡介
工業機器人是一種由程序預先確定其運動方式的機電一體化機械裝置,由操作機(機械本體)、控制器、伺服驅動系統和檢測傳感裝置構成。工業機器人的機械系統可分為執行機構和驅動機構。
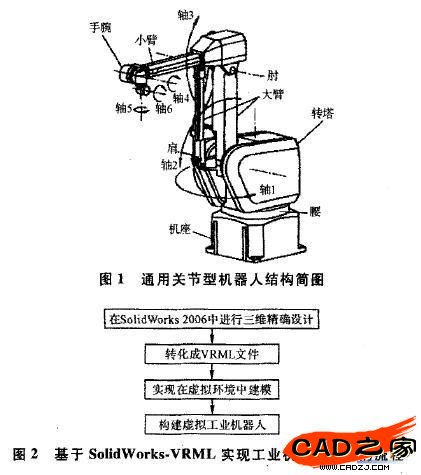
如圖1所示,關節型工業機器人的執行機構-機械臂可由基座、旋轉臺、連接件〔大臂)及小臂、手爪等實體組成,是一個開鏈式的多連桿結構,始端連桿為機械臂的基座,末端連桿與機械臂的手爪相連,相鄰連桿間以旋轉關節或柱關節相連。機械臂可完成旋轉、回轉和伸縮這3種不同的動作形態。
2. 2工程實現
基于SolidWorks-VRML,在虛擬環境中實現工業機器人建模的流程,如圖2所示。
2.2.1工業機器人三維模型精確設計
根據工業機器人的結構組成,可以將其分解成基座、旋轉臺、連接件(大臂)及小臂、手爪等實體模型。首先可利用SolidWorks強大的實體造型功能,實現零件的三維模型化。
在SolidWorks 2006中對基座的三維建模,如圖3所示。基座是支撐和固定整個工業機器人的基礎。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF