2.2.2工業機器人在虛擬環境中建模
由于VRML造型具有較強的移植功能,具有便于網上傳輸、運動圖像編程簡單等特點,將其應用于在虛擬環境中實現工業機器人的建模。
在用SolidWorks 2006建立工業機器人三維實體模型后,利用SolidWorks 的VRML轉換程序將其輸出為VRML文件:"文件-另存為:保存類型----VRML(*wrl)-選項-文件格式:VRML-版本:VRML97,即可輸出為VRML文件。
在Para11e1Graplue。公司的Cortona瀏覽器的基礎上,在虛擬環境中構建可視的實體模型,如圖4所示。Cortona瀏覽器功能十分強大,使用方便,能夠直接插人Windows操作系統的IE瀏覽器中使用,而且3D效果、交互性能近乎完美,是目前使用最多的VRML瀏覽器。
2.2.3 虛擬工業機器人的構建
在虛擬環境中對工業機器人的各組成實體進行精確建模后,利用VRML作為建構的工具,再進行虛擬工業機器人的構建,這時就需要在源程序中對各實體模型加以修改。
在虛擬工業機器人的構建中,使用VrmlPad 2.1軟件進行編程,ParallelGraphics公司的VrmlPad是一種功能強大且簡單易用的VRML開發設計專業軟件,支持VRML97標準。
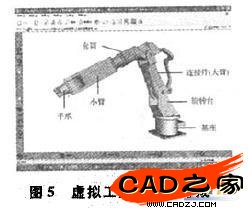
程序設計思想如下:采用嵌套式結構,建立Transform節點,每個Transform節點對應一個實體模型;實體模型的導人通過增加節點實現,將各實體模型的VRML文件作為Inline內聯節點導人,同時這些節點逐層嵌套包含;虛擬工業機器人的虛擬裝配由Transform節點的translation域、rotation域和scale域控制,進行平移、旋轉和縮放變換,以達到外形尺寸的一致性,實現了工業機器人在虛擬環境中的構建(如圖5所示)。
這種虛擬建模方法采用Inline內聯節點的方式引人各實體模型的VRML文件,使VRML程序設計結構化、模塊化、層次化,從而提高軟件的設計質量;此外可以大大節省空間,減小文件的長度,為程序調試和定義
動畫帶來很大的方便;也可進一步用于各種支持VRML文件格式的開發程序(如.Tava,javaScript等)中,有利于對組成虛擬工業機器人的各實體模型再次進行腳本編程,實現運動控制的虛擬仿真。
3結束語
實體模型的建立是形成虛擬現實系統的基礎,也是其最為關鍵的技術之一。利用SolidWorks-VRML實現虛擬現實的精確建模,大大減少了建模的工作量,提高了工作效率,更重要的是能夠滿足虛擬現實場景中對實體的精確度的要求,虛擬工業機器人模型的精確程度直接關系到過程控制的效果。
而VRML作為新的網絡開發平臺在機器人虛擬控制研究中具有廣泛的應用前景,尤其是隨著計算機網絡技術的發展,為機器人遠程虛擬遙控的研究開辟了一個新的途徑。
相關文章
- 2021-09-08BIM技術叢書Revit軟件應用系列Autodesk Revit族詳解 [
- 2021-09-08全國專業技術人員計算機應用能力考試用書 AutoCAD2004
- 2021-09-08EXCEL在工作中的應用 制表、數據處理及宏應用PDF下載
- 2021-08-30從零開始AutoCAD 2014中文版機械制圖基礎培訓教程 [李
- 2021-08-30從零開始AutoCAD 2014中文版建筑制圖基礎培訓教程 [朱
- 2021-08-30電氣CAD實例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風暴2:Maya影像實拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術設計案例教程中文版AutoCAD 建筑設計案例
- 2021-08-29環境藝術制圖AutoCAD [徐幼光 編著] 2013年PDF下載
- 2021-08-29機械AutoCAD 項目教程 第3版 [繆希偉 主編] 2012年PDF