3.2運(yùn)動(dòng)仿真
3.2.1差速行駛狀態(tài)仿真模擬
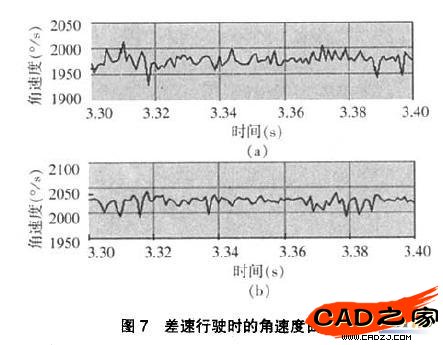
根據(jù)該差速器所用于車輛的行駛速度30~60km/h,經(jīng)換算后得差速器的角速度一般為1200~2400°/s,因此將差速器殼旋轉(zhuǎn)副速度設(shè)置為2000°/s。車輛轉(zhuǎn)彎時(shí),左右兩驅(qū)動(dòng)輪的阻力矩大小不同,所以應(yīng)給兩差速輪添加旋轉(zhuǎn)方向與差速器殼方向相反的單作用力矩,其值分別為40N·m和20N·m。設(shè)置運(yùn)動(dòng)仿真時(shí)間為5s,幀數(shù)為5000,然后即可開(kāi)始仿真運(yùn)算。根據(jù)運(yùn)算仿真結(jié)果,分別輸出左右差速輪在3.3~3.4,時(shí)間段的速度曲線如圖7所示,其中圖(a)的阻力矩為40N · m,圖(b ),的為20N·m。
由于仿真結(jié)果輸出csv后,一以電子表格的形式輸出了差速輪間隔0.001 s的角速度值,由此可求得左右兩差速輪的平均角速度分別為ω1=1976.8°/s;ω2=2021.1°/s,二者的平均值為1998.95°/s,由此得ω1+ω2≈2ω0,這也驗(yàn)證了軸向滑塊凸輪式差速器基本能夠滿足差速器的設(shè)計(jì)要求。
3.2.2直線行駛狀態(tài)仿真模擬
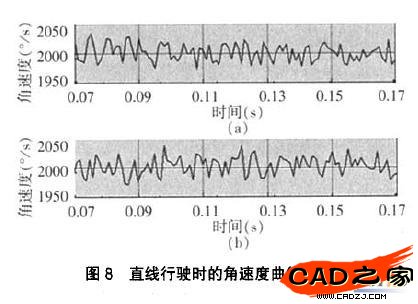
在差速行駛狀態(tài)模型基礎(chǔ)上,將兩差速輪的單作用力矩大小都設(shè)置為30 N·m,其余參數(shù)設(shè)置都不變,這樣即可進(jìn)行直線行駛狀態(tài)的仿真模擬。仿真時(shí)間設(shè)置為3s,幀數(shù)為3000,然后開(kāi)始仿真運(yùn)算。根據(jù)仿真運(yùn)算結(jié)果,輸出左右兩差速輪0.07-0.17s時(shí)間段的速度曲線如圖8所示,其中圖(a)為左側(cè)差速輪的角速度曲線,圖(b)為右側(cè)差速輪的角速度曲線。并由此輸出csv后,以電子表格的形式輸出了差速輪間隔0.001 s的角速度值,由此求得差速輪的平均角速度分別為ω1=2000.3°/s , ω2=2001.2°/s。由此得ω1≈ω2≈ω0,ω1+ω2≈2ω0。
4結(jié)束語(yǔ)
本文根據(jù)差速器的設(shè)計(jì)要求,應(yīng)用Solidworks軟件制作了軸向滑塊凸輪式差速器主要零件的實(shí)體模型,并完成虛擬裝配。然后利用SolidWorks插件工具COSMOSMotion軟件,對(duì)該差速器進(jìn)行了運(yùn)動(dòng)仿真。通過(guò)對(duì)各零部件的三維參數(shù)化建模、裝配及運(yùn)動(dòng)仿真的有機(jī)結(jié)合,直觀、形象地再現(xiàn)了差速器的工作過(guò)程,一獲得了有關(guān)零件的運(yùn)動(dòng)特性,分析計(jì)算結(jié)果表明,當(dāng)左右兩差速輪的合阻力矩為60N·m,且兩側(cè)阻力矩差為20N·m或0 N·m時(shí),有ω1+ω2≈2ω0。因此,可以認(rèn)為軸向滑塊凸輪式差速器基本能夠滿足差速器的設(shè)計(jì)要求。另外,本文為差速器的設(shè)計(jì)與研究提供了一種方法和捷徑,在研發(fā)過(guò)程中應(yīng)用這種方法可大大縮短差速器的研發(fā)周期,降低產(chǎn)品的研發(fā)成本,并為以后進(jìn)一步對(duì)這一新型差速器的結(jié)構(gòu)優(yōu)化設(shè)計(jì)、制造及運(yùn)動(dòng)分析奠定了基礎(chǔ)。
相關(guān)文章
- 2021-09-08BIM技術(shù)叢書(shū)Revit軟件應(yīng)用系列Autodesk Revit族詳解 [
- 2021-09-08全國(guó)專業(yè)技術(shù)人員計(jì)算機(jī)應(yīng)用能力考試用書(shū) AutoCAD2004
- 2021-09-08EXCEL在工作中的應(yīng)用 制表、數(shù)據(jù)處理及宏應(yīng)用PDF下載
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版機(jī)械制圖基礎(chǔ)培訓(xùn)教程 [李
- 2021-08-30從零開(kāi)始AutoCAD 2014中文版建筑制圖基礎(chǔ)培訓(xùn)教程 [朱
- 2021-08-30電氣CAD實(shí)例教程AutoCAD 2010中文版 [左昉 等編著] 20
- 2021-08-30電影風(fēng)暴2:Maya影像實(shí)拍與三維合成攻略PDF下載
- 2021-08-30高等院校藝術(shù)設(shè)計(jì)案例教程中文版AutoCAD 建筑設(shè)計(jì)案例
- 2021-08-29環(huán)境藝術(shù)制圖AutoCAD [徐幼光 編著] 2013年P(guān)DF下載
- 2021-08-29機(jī)械A(chǔ)utoCAD 項(xiàng)目教程 第3版 [繆希偉 主編] 2012年P(guān)DF